
近日,2023年公布全国大学生电子设计竞赛获奖名单,永利集团喜获佳绩,共有三支队伍获省一等奖、四支队伍获省二等奖、十支队伍获省三等奖。值得一提的是,其中由电子与电气工程学院(以下简称电子学院)的王培佳、宋奕彤和杨采妮三名同学组成的队伍获得全国二等奖、省级一等奖的好成绩。

从左至右为王培佳、杨采妮、宋奕彤
荣誉的背后,是学校和二级学院毫无保留的支持,是指导老师悉心指导和帮助,更是参赛学生持之以恒的奋斗以及不为人知的付出。下面,让我们一起走近电子与电气工程学院,了解学院发展情况以及获国奖的队伍背后的故事吧!
“我们在不断试错”
在此次的全国大学生电子设计竞赛中,杨采妮、宋奕彤、王培佳的《单相逆变器并联运行系统》项目荣获全国二等奖,这是这支队伍成员第二次搭档参加竞赛。对于同是电气工程专业的他们来说,这也是一次充满了挑战和成长机会的旅程。
专业上的学习让他们有一定的编程及单片机知识基础,在buck模块、PID算法、boost逆变模块等知识的实操中也缩短了他们与此次大赛的距离。怀揣着提高专业技能与开阔眼界的渴望,他们一拍即合,基于专业与赛事的契合,选择了电源类赛道。
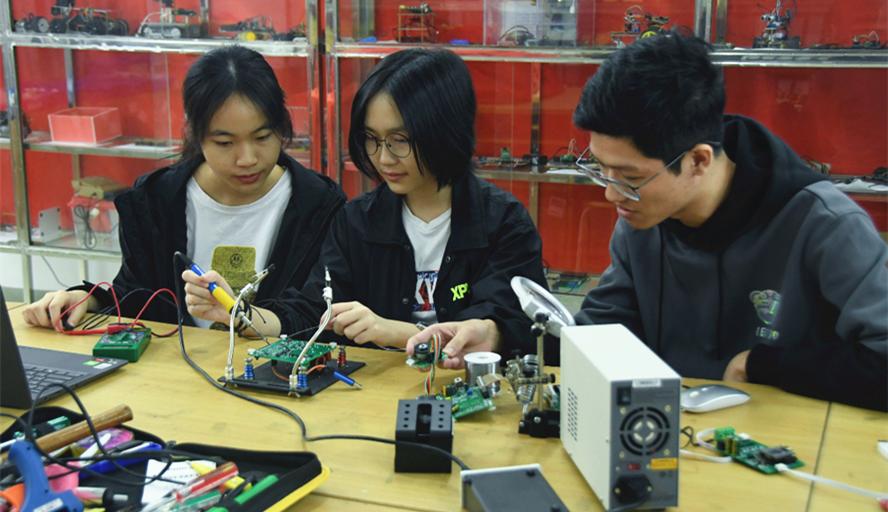
图为杨采妮、宋奕彤、王培佳进行电路实验
王培佳坦言,作为电源知识的初学者,备赛期间他们遇到了不少的困难,如电源形式所对应的电路结构、多种形式的电路在实际应用上的区别、不同电路最合适的电源形式等,大量陌生的电源知识无形中加大了他们竞赛的难度。面对难题,团队成员没有选择退缩。“书本看不懂,我们就去网上找详细讲解,学习别人成功的电源设计中采用的电路设计,接下来就是直接上手,对不同类型不同模式的电路进行仿真,在不断的仿真测试中学习巩固。‘试错’是我们学习进步的很重要一个过程。”他们在遇到难题,剖析难题,克服难题中不断磨砺并逐步成长。“在比赛的前期准备阶段,我们团队与黄家伟老师进行了多次关于技术细节的讨论和探究。”以校内期末考试为节点,前一个月半,他们在老师的指导下进行理论知识的学习;后一个月半,他们上手操作,将理论知识运用到实际操作中,在长达三个月的备赛时间,他们刻苦训练,做好充分准备。

图为宋奕彤进行实作
这次的赛事持续四天三夜,而且要求紧密贴近实际工程问题,难度较高,团队在参赛过程中也遇到了多重困难。在制作逆变电路时,硬件发烫严重总体效率降低,远不能够达到题目要求。刚发现问题时,他们焦急地寻找原因,担心设计的电路出现问题。一旦电路出现问题,则需要重新设计电路并打板调试,很有可能会失去此次比赛机会。但团队间的互相信任让他们很快冷静下来,他们一步一步地排查,最终找到了发烫的元件——全桥电路中的一系列贴片mos管。“我们发现当输出电压比较低的时候电路运行是正常的,效率也很高。所以察觉出问题是在硬件,而不是电路本身,于是马上选取性能更好的兼容性更强的mos管来解决问题。” 他们就在这样的反复打磨、修缮细节中完成了“单相逆变器并联运行系统”的制作。在赛事进行的四天三夜里,他们更是守在金工楼,全心投入完成参赛作品。“我们心里都想着一定要把它做完,每当这样想的时候就感觉不困了。”团队的齐头并进让每个人都忘却了困难和煎熬,这次经历也让他们更深刻地认识到了团队合作以及在解决问题中主动学习的重要性。
面对各种挑战,王培佳团队选择直面不回避;面对空白和无垠,他们选择书写不留白,如此毅力和韧劲让团队在创作作品的过程中一步步实现跨越。同样,他们团队的拼劲和闯劲也是其他参赛队伍的真实写照,他们在键盘上不断推敲代码、在实验室里不厌其烦地操控仪器,日复一日的坚持不会辜负任何人,他们付出的心血和努力也有所收获。
“他们才是主角”
作为参赛队伍的指导老师,李博和黄家伟在团队备赛过程中功不可没。李博作为电子与电气工程学院比赛队伍的带队老师,有着丰富的带队经验。在三个月的备赛时间中,李博一直为各团队提供设备支持,同时他还是团队的“情绪助推器”,不断鼓励大家坚持学习理论知识,为日后的实际操作打下理论基础。他希望大家能够多经历多参与比赛过程,学以致用,从中掌握应用技能。

图为李博、黄家伟指导王培佳团队
黄家伟是杨采妮、宋奕彤、王培佳三位学生《电力电子技术》课程的任课老师,在电气方面有着丰富的专业知识。出于对专业知识的需要和对黄家伟的崇拜,三位学生主动找到黄家伟,希望他能够作为指导老师参与此次比赛。“从教十余年,这是第一次有人找我当指导老师。”黄家伟答应了队伍的“邀约”,顺利成为这支队伍的指导老师,在备赛过程中给予了这支斩获国奖的队伍不少理论指导。
团队在前期确定方向后,久久未设计出相应的电路框架。黄家伟总结当时情况,指导学生结合理论与实际,与学生一同讨论电路设计方案,推动进程重回正轨。
当谈及三位学生给黄家伟留下的最深刻印象时,他指出团队扎实的基本功、肯攀登的实践精神是他最欣赏的。“团队里三位成员广泛学习软件、硬件等板块的内容,学科理论知识扎实,实践操作烂熟于心,他们不是单纯地、割裂地各司其职,而是遇到问题时,常采用合作探讨的方式共同解决。”黄家伟对他们赞赏有加。
图为指导老师与王培佳团队合照
“他们才是主角。”黄家伟反复提及。在他看来,国家二等奖这一荣誉的主角并不是学院,也不是老师,而是三位参赛学生。指导老师在赛事中的只是起着答疑解惑、引导的作用,真正的“修行”还在于学生。
“我们会是坚实的后盾”
斩获多个奖项的背后,既离不开团队每位成员精雕细琢地打磨,也离不开学校与学院的支持。这些获奖队伍的学生大多来自电子与电气工程学院,电子学院既是校内的老牌学院,也是永利集团首批获批硕士学位授予权的学院之一。电子学院在建设的过程中,不断优化提升教学水平和各项设备,不断完善学科竞赛管理体系,同时鼓励学生积极参与各类竞赛,培养学生创新思维、团队合作以及解决实际问题的能力,打造知识、能力、素质协调发展的创新型人才。

图为副院长李云鹤指导参赛团队
“我们要为学生提供好的学习环境。”李云鹤副院长如是说。为支持此次竞赛,电子学院为参赛学生提供了实验室、工作室和经费支持,同时也让多位经验丰富的老师组成指导团队,对学生进行技术培训和设计建议,让参赛学生能够舒心、放心,将身心投入比赛的准备中。除此之外,学院还加强与企业的合作,共同设立实验室、实践基地,在保障物质条件的基础上,为学生提供更广阔的平台,更好地提升自身能力。
在学院的大力培养下,自2019年以来,电子学院学生获全国大学生电子设计大赛二等奖4次,广东省一等奖5次,二等奖9次,三等奖26次;获批国家级大学生创新性实验项目10多项;获广东省工科大学生综合实验技能竞赛二等奖3项、三等奖3项;获华南大学生物理实验设计大赛三等奖1次;在广东省物理师范生教学技能大赛中屡获佳绩……
近年来,学校在办学实践中,始终把提升学生的创新能力等综合素质作为人才培养的核心要义,打造应用型人才培养体系和机制,加快建设新时代特色鲜明的高水平应用型大学。在工科、文科、艺术各领域奖项的硕果,也说明学生在学校的培养下各项专业技能、创新能力、实践能力都得到提高。
2023年全国大学生电子设计竞赛
永利集团获奖名单
国赛二等奖队伍
学生:王培佳 宋奕彤 杨采妮
指导老师:李博 黄家伟 袁如文
作品名称:单相逆变器并联运行系统
项目简介:单相逆变器并联运行系统采用单相 SPWM 桥式全控电路及 IR2110S 驱动芯片实现逆变。通过滤波器滤波后输出到电压电流采样电路进行采样及反馈,增加了电源的稳定性。反馈的值传输给单片机进行程序上的分析与控制,达到反馈功能。通过软件编程控制的方式驱动硬件逆变电路,可以更好的控制 SPWM 幅度频率,产生高质量的 SPWM 波,使电源更加可靠。利用 PID 反馈产生电压环电流环能够很好的实现系统的两个逆变器同频率、同幅值、同相位,可以实现两个逆变器并联之后电压 24V,频率 50HZ 输入,达到 4A 电流输出。通过锁相环电路保证各个基准电压同步,提高了控制精度和系统稳定性,达到可并网条件。系统很好的完成基本指标,输入功率为50.84W 输出功率为 48W 效率为 94.4% ,能够输出标准的正弦波。
省赛一等奖队伍
学生:赵建朝 蔡梓彬 陈柏舟
指导老师:范羽 袁如文 李云鹤
作品名称:运动目标控制与自动追踪系统
项目简介:运动目标控制与自动追踪系统是基于STM32和Opencv设计的,opencv实现识别激光位置并通过串口传输到STM32,STM32采集激光位置和期望位置进行PID运算,最后输出PWM控制舵机。
学生:吴宏庚 方思杰 程嵘
指导老师:李云鹤 黄家伟 李博
作品名称:单相逆变器并联运行系统
项目简介:设计并制作由 2 个单相逆变器组成的并联系统。逆变器并联后可为负载供电,也可通过变压器并入220V电网。主逆变器电路以全桥逆变为拓扑结构,以 stm32f103c8t6 为控制核心,采用双极性SPWM调制,进行电压单闭环调控输出目标值。无通信并网采用下垂控制,通过主逆变器电压单环,从机电路电流单环,对主从机锁相环获得相位差,通过主机 pid 电压环跟随从机相位从而同步相位和频率输出实现并网。
省赛二等奖队伍
学生:崔镒泰 陈艺庆 梁家伟
指导老师:李云鹤 袁如文 李博
作品名称:运动目标控制与自动追踪系统
项目简介:通过openmv识别出矩形的四个坐标点,通过uart通信把坐标值给stm32主控,通过公式得出舵机运动的角度;追踪部分是通过openmv主控,通过颜色识别与pid的调整对目标激光的跟踪。当时大概分了几个步骤进行,开始大家一起审题分好一人搞算法,两人把硬件结构支撑起来,后开始通信的工作。
学生:方奕熹 郑溢涛 黄绮彤
指导教师:陈晓明 李博 任瑾
作品名称:运动目标控制与自动追踪系统
项目简介:本设计是自主搭建,将红绿色激光模块固定在二维云台的顶部,基于openmv作视觉跟踪红绿色激光,识别黑框;stm32f103rct6单片机为控制核心,加以电源电路、直流可调降压电源模块lm2596s、矩阵按键。经过openmv通过串口通信传输红绿色激光的中心坐标和黑框的四个角坐标,再由stm32f103rct6的IO口输出PWM信号控制二维云台的舵机上下、左右移动。
学生:谢骐骏 黄怡容 陈志安
指导老师:袁如文 李博 王霞辉
作品名称:运动目标控制与自动追踪系统
作品简介:作品采用二维云台实现红色激光任意位置复位和实现红色激光画特定白边矩形方框、任意黑边方框。该作品由二维云台,openmv,stm32,红色激光笔,以及电源与降压模块组成。
学生:林子畅 陈浩 何思敏
指导老师:袁如文 李博 范羽
作品名称:运动目标控制与自动追踪系统
项目简介:本系统是以STM32F103C8T6单片机为控制核心,加以电源电路、LD-1501MG*LD-3015MG(简易电动二维云台)、面包板、红色激光笔、亚克力板、以及若干条杜邦线构成红色激光笔固定在二自由度云台控制垂直方向的舵机架上面。由STM32F103C8T6的IO口驱动LD-3015MG金属数字舵机以达到智能控制红色激光笔从屏幕任意地方回到原点目的,再由STM32F103C8T6在keil5编译环境对x轴和y轴的两个舵机参数进行调节,最后通过定时器输出合适的PWM波,控制数字舵机旋转相应的角度,实现激光在目标屏幕上自动追踪的功能。
省赛三等奖队伍
学生:陆宇楷 陈俊宇 李杰哲
指导老师:袁如文 李云鹤 李嘉辉
作品名称:运动目标控制与追踪云台
作品简介:系统采用stm32和openmv组合,openmv实时采集视觉激光信息,并通过stm32采用pid控制算法,完成对云台的控制。
学生:李豪 陈文栋 卢翔宇
指导老师:许莉 袁如文 谷春艳
作品名称:运动目标控制与自动追踪系统
项目简介:本系统由 OpenMV 嵌入式计算机视觉平台,PID 算法,openmv 智能摄像头模块,二维舵机云台,人机交互系统,电机模块,红外激光等模块构成。摄像头模块用于采集图像信息,以 openmv 代替主设实现对于舵机的控制并进行图像数据处理,通过使用 PID 控制算法,实现对舵机位置的精确控制,从而使系统能够准确地追踪目标。系统功能由按键进行控制,具有人机交互界面,可直观的显示出实验结果,具有快速的响应速度与智能性。系统可以在一定程度上实现图像处理、电机控制、光斑追踪等功能,非常创新和有潜力。
学生:许伟枫 梁梓康 陈灿权
指导老师:李博 王晓明 黄鹏
作品名称:运动目标控制与自动追踪系统
项目简介:本作品的参赛题目是2023年全国大学生电子设计大赛E题。硬件组成部分由stm32做为主控芯片,openmv作为视觉识别以及二维云台组成的自动追踪系统。通过keil5已经openmvIDE编辑而成。主要实现题目基本要求。屏幕任意位置复位原点、沿屏幕边界顺时针一周、任意位置摆放靶纸,沿靶纸顺时针移动一周。
学生:吴宇杰 钟文浩 朱康俊
指导老师:吴海涛 黄伟 李云鹤
作品名称:运动目标控制与自动追踪系统
项目简介:参赛题目为运动目标控制与自动追踪系统,本系统以两个二维云台为主体,每个二维云台的控制核心为STM32F103RCT6单片机,舵机为主要执行机构,激光笔、OpenMV-4摄像头模块、LM2596s芯片自制多路降压模块共同组成的系统,通过Openmv-4进行对屏幕、激光的颜色与矩形识别,由单片机进行坐标解算与pid运算,控制舵机移动激光点完成目标操作。
学生:周永艳 吴丽婷 利娇
指导老师:陈晓明 袁如文 元泽怀
作品名称:运动目标控制与自动追踪系统
项目简介:实现一个运动目标控制与自动追踪系统,包括红色光斑位置控制系统和绿色光斑位置控制系统。系统通过使用OpenMV摄像头识别模块,二维云台,舵机和STM32最小系统板单片机,结合电源模块,通过图像处理和控制算法,实现光斑位置的精确控制和自动追踪功能。
学生:吴南洋 李劲松 赵智宏
指导教师:李云鹤 袁如文 肖雨婷
作品名称:运动目标控制与自动追踪系统
项目简介:本系统以STM32F103C8T6单片机为控制核心,由Openmv、Lm2596s电源模块、KBS-K20舵机模块构成。移动目标云台通过Openmv的矩形识别获取要捕捉的对象的坐标值,并将其通过串口传输到STM32单片机中。再通过STM32的程序代码将获得的数据通过适当的PID算法计算出云台需要移动的角度,将其转换为PWM控制信号后发送给云台的舵机进行驱动。追踪目标云台通过Openmv颜色识别进行移动目标点的定位,并通过OpenMV IDE调试工具直接操控云台对目标点进行追踪。经测试,光斑能在10秒内沿屏幕以及任意旋转角度的A4靶纸四周边线顺时针移动一周。启动运动目标及自动追踪系统后,绿色光斑能够在2秒内自动追踪红色光斑,并发出连续声光提示。
学生:郑泽凯 罗沛松 王明才
指导教师:范羽 李博 袁如文
作品名称:运动目标控制与自动追踪系统
项目简介:参加的作品项目为运动目标控制与自动追踪系统,该作品由云台,openmv,stm32最小系统,激光,以及电源与降压模块组成。通过复位按键能够实现云台上搭载的激光的光束复位到矩形的中央。通过追寻按键可以使光束绕着铅笔画的矩形以及黑胶带所围成的矩形走
学生:杨林 赖智轩 莫镇宏
指导老师:陈荣荣 袁如文 李博
作品名称:运动目标控制与自动追踪系统
项目介绍:本研究采用软硬件结合的方法设计了一套运动目标控制与自动追踪系统。该系统由OpenMV嵌入式计算机视觉平台、STM32单片机控制模块、摄像头模块、显示屏模块、人机交互系统以及二轴舵机云台和激光笔构成一个闭环控制系统。摄像头模块用于采集图像信息,经由OpenMV进行图像数据处理,并通过PID精确算法调节舵机,从而控制激光笔的光斑在屏幕上按照设定程序进行移动。本系统实现了以激光笔的光斑作为运动控制目标的自动追踪系统,包括复位功能、沿屏幕运动、沿A4纸边缘运动以及自动追踪光斑等功能。系统在完成任务要求的同时表现出良好的鲁棒性。此外,本系统还具备人机交互界面,各参数及测试模式可由按键输入,并通过显示屏直观地显示,具有智能性和快速的反应速度。
学生:黄樾 许杰麟 姚荣华
指导老师:程绪信 李博 潘志方
作品名称:运动目标控制与自动追踪系统
项目介绍:本系统采用stm32f103c8t6单片机作为主控制器,完成数据处理,控制云台舵机,采用OpenMV3作为机器视觉模块,OpenMV3搭配一个云台和一个红外线激光笔模块。stm32外接一个稳压板(DC-DC电源模块)与OpenMV3及其二维云台连接,通过stm32f103c8t6单片机与OpenMV3的连线组装,实现红色激光笔对屏幕上线索进行运动目标控制、自动巡迹追踪的一系列操作。本系统由外接SRJ-18650恒压直流电源作为电源,和外接一个OLED显示屏来显示舵机的角度实现舵机的角度控制。
学生:詹明杰 杨联灏 赖星霖
指导老师:李博 陈晓明 陈伦强
作品名称:运动目标控制与自动追踪系统
项目介绍:本作品以STM32F103C8T6为主控芯片,协同各个模块共同工作驱动二维运动云台以实现题设中的运动目标控制与自动追踪系统。本系统采用摄像头采集信息,经过图像处理模块OpenMv得到中心点和矩形四角坐标,将坐标发给主控芯片,从而实现运动目标的控制和轨迹跟踪。在舵机控制中,PID算法可以根据当前舵机位置和目标位置之间的差异,计算出一个控制信号PWM,该信号会驱动舵机转动到目标位置。通过不断地调整PID参数,可以使舵机响应速度更快、精度更高。